
metadata
license: cc-by-nc-sa-4.0
task_categories:
- robotics
tags:
- imitation-learning
- manipulation
- tactile
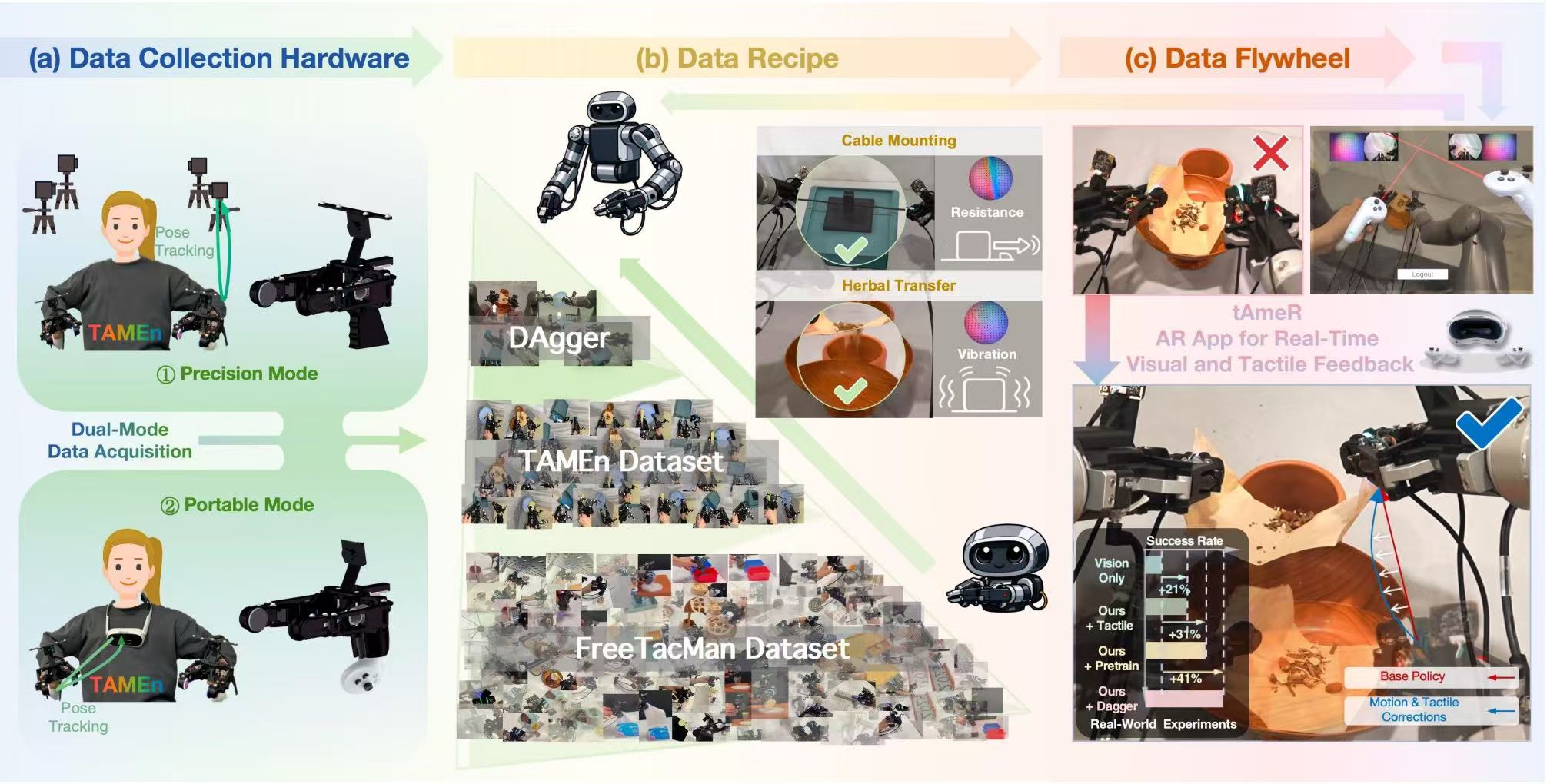
TAMEn: Tactile-Aware Manipulation Engine for Closed-Loop Data Collection in Contact-Rich Tasks
🎯 Overview
TAMEn builds upon the UMI paradigm with key enhancements in multimodality, precision-portability synergy, replayability, and data flywheel.
Please refer to our 🚀 Website | 📄 Paper | 💻 GitHub for more details.
📂 Dataset Structure
TAMEn/
├── Binder_Clip_Removal/
├── Cable_Mounting/
├── Dish_Washing/
└── Herbal_Transfer/
Each task folder contains:
- Video files:
TaskName_N_camera1.mp4toTaskName_N_camera4.mp4 - Trajectory files:
TaskName_N_traj.csv
🧾 Data Format
Video Files
- Format: MP4
- Views: 4 synchronized camera views (
camera1~camera4) per trajectory
Trajectory Files
- Format: CSV
- Naming:
TaskName_N_traj.csv
📝 Citation
If you use TAMEn in your research, please cite:
@misc{wu2026tamentactileawaremanipulationengine,
title={TAMEn: Tactile-Aware Manipulation Engine for Closed-Loop Data Collection in Contact-Rich Tasks},
author={Longyan Wu and Jieji Ren and Chenghang Jiang and Junxi Zhou and Shijia Peng and Ran Huang and Guoying Gu and Li Chen and Hongyang Li},
year={2026},
eprint={2604.07335},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2604.07335},
}
💼 License
This dataset is released under the CC BY-NC-SA 4.0 License.
📧 Contact
For questions or issues regarding the dataset, please contact: Longyan Wu ([email protected]).